ÖC(j©®)Ų„╚╦Ąū▒P╩ŪÖC(j©®)Ų„╚╦īŹ(sh©¬)¼F(xi©żn)▀\(y©┤n)äė(d©░ng)Ą─ųžę¬Łh(hu©ón)╣Ø(ji©”)Ż¼▓╗āH╚┌║Ž┴╦ČÓĘNé„ĖąŲ„Ż¼▀ĆĮY(ji©”)║Ž┴╦SLAM╦ŃĘ©Ą╚║╦ą─╝╝ąg(sh©┤)ĪŻ
ī”(du©¼)äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦Ąū▒PüĒ(l©ói)šf(shu©Ł)Ż¼Ųõ╚┌║Ž┴╦╝ż╣Ō└ū▀_(d©ó)Īó╔ŅČ╚özŽ±Ņ^Īó│¼┬Ģ▓©╝░Ę└Ą°┬õĄ╚ČÓéĆ(g©©)é„ĖąŲ„Ż¼▓óĮY(ji©”)║Ž┴╦ūįų„čą░l(f©Ī)Ą─Gąį─▄SLAM╦ŃĘ©ĪŻ╩╣ŲõōĒėą┐╔┐┐Īóęūė├Ą─Č©╬╗ī¦(d©Żo)║ĮĘĮ░ĖŻ¼╝┤╩╣├µī”(du©¼)Ė„ŅÉÅ═(f©┤)ļsŁh(hu©ón)Š│Ż¼╦³ę▓─▄ū÷ĄĮūįų„┬ĘÅĮęÄ(gu©®)äØ╝░šŽĄK╬’ęÄ(gu©®)▒▄Ą╚╣”─▄ĪŻ
╚ń┤╦ųžę¬Ą─ÖC(j©®)Ų„╚╦Ąū▒PŻ¼╦³Š┐Š╣ė╔──ą®║╦ą─╝╝ąg(sh©┤)ĮM│╔─žŻ┐
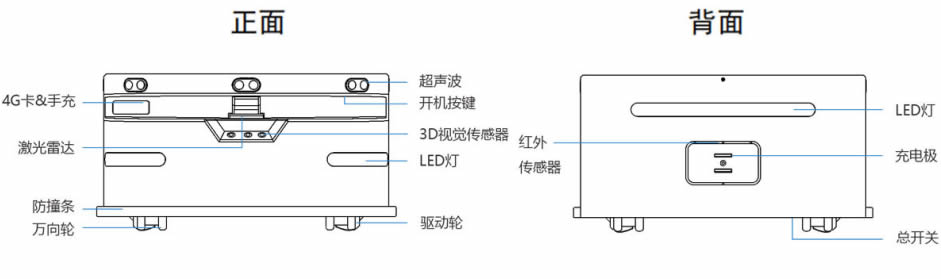
╝ż╣Ō└ū▀_(d©ó)é„ĖąŲ„Ż║ └¹ė├╝ż╣Ō└ū▀_(d©ó)é„ĖąŲ„┐╔Ģr(sh©¬)┐╠Æ▀├Ķų▄ć·Łh(hu©ón)Š│Ż¼╠ß╣®ĄžłDöĄ(sh©┤)ō■(j©┤)Ż¼śŗ(g©░u)Į©Š½Č╚G▀_(d©ó)5cmĄ─ĄžłDŻ¼▓ó╗∙ė┌įōĄžłDöĄ(sh©┤)ō■(j©┤)īŹ(sh©¬)¼F(xi©żn)ūįų„┬ĘÅĮęÄ(gu©®)äØ╝░ī¦(d©Żo)║Į╣”─▄Ż╗
╔ŅČ╚özŽ±Ņ^é„ĖąŲ„Ż║ ╔ŅČ╚özŽ±Ņ^é„ĖąŲ„┐╔é╔£y(c©©)ĄĮ╬╗ė┌└ū▀_(d©ó)Æ▀├ĶŲĮ├µ╔ŽĘĮĄ─šŽĄK╬’Ż¼▓ó╝░Ģr(sh©¬)░l(f©Ī)╦═ą┼╠¢(h©żo)▀M(j©¼n)ąąęÄ(gu©®)▒▄Ż╗
│¼┬Ģ▓©é„ĖąŲ„Ż║ │¼┬Ģ▓©é„ĖąŲ„į┌╣żū„Ģr(sh©¬)Ż¼─▄£╩(zh©│n)┤_╠Į£y(c©©)ĄĮ▓Ż┴¦ĪóńR├µĄ╚G═Ė▓─┘|(zh©¼)šŽĄK╬’Ż¼Å─Č°į┌┐┐Į³▀@ą®╬’¾wŪ░─▄╝░Ģr(sh©¬)▒▄ūīŻ╗
Ę└Ą°┬õé„ĖąŲ„Ż║ Ę└Ą°┬õé„ĖąŲ„┐╔Ä═ų·ÖC(j©®)Ų„╚╦ 360ĪŃé╔▓ķų▄ć·Ą─╣żū„Łh(hu©ón)Š│Ż¼┼ąöÓ╣żū„ģ^(q©▒)ė“╩Ūʱ┤µį┌▀ģĮńĪó┼_(t©ói)ļAĪóŲ┬Č╚Ą╚ŪķørŻ¼Å─Č°░l(f©Ī)╦═šł(q©½ng)Ū¾ą┼╠¢(h©żo)Ż¼▒▄├ŌĄ°┬õŻ╗
─ŻēK╗»Č©╬╗ī¦(d©Żo)║ĮŽĄĮy(t©»ng)Ż║ ─ŻēK╗»Č©╬╗ī¦(d©Żo)║ĮŽĄĮy(t©»ng)ā╚(n©©i)ų├SLAMę²ŪµĄ─ī¦(d©Żo)║ĮČ©╬╗║╦ą──ŻēKŻ¼GČ╚╝»│╔Ż¼¤o(w©▓)ąĶĮĶų·═Ō▓┐▀\(y©┤n)╦Ń┘Yį┤Ż¼┐╔ų▒Įė▌ö│÷ÖC(j©®)Ų„╚╦╦∙į┌Łh(hu©ón)Š│ĄžłDĪóČ©╬╗ū°ś╦(bi©Īo)ū╦æB(t©żi)Ż¼ā╚(n©©i)ų├ČÓĘNÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)┐žųŲ╦ŃĘ©Ż¼┐╔╠ß╣®└Õ├ūJäeĄ─Č©╬╗║═ĄžłDŠ½Č╚Ż¼į┌╬┤ų¬Łh(hu©ón)Š│ųąīŹ(sh©¬)Ģr(sh©¬)ęÄ(gu©®)äØ┬ĘÅĮŻ¼▓ó▀M(j©¼n)ąąšŽĄK╬’ęÄ(gu©®)▒▄ī¦(d©Żo)║ĮŻ¼ūįų„īżšęČ╠┬ĘÅĮĪŻ
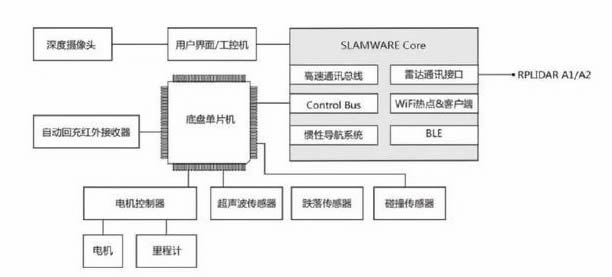
į┌ÖC(j©®)Ų„╚╦Ąū▒PĮY(ji©”)śŗ(g©░u)│²┴╦╩╣ŲõōĒėąūįų„Č©╬╗ī¦(d©Żo)║Į╝░┬ĘÅĮęÄ(gu©®)äØ╣”─▄Ż¼ūįų„╗ž│õ╝╝ąg(sh©┤)ę▓╩Ū▓╗┐╔╗“╚▒Ą─Ż¼Č°Ark▓╔ė├Ą─ūįų„╗ž│õ╝╝ąg(sh©┤)Ż¼┐╔═Ō▓┐š{(di©żo)Č╚ŅA(y©┤)╝s│õļŖĪŻ«ö(d©Īng)ļŖ┴┐▌^Ą═Ģr(sh©¬)Ż¼Ģ■(hu©¼)ūįų„ĘĄ╗ž│õļŖē]│õļŖŻ¼į┌žō(f©┤)▌dŪķørŽ┬┐╔īŹ(sh©¬)¼F(xi©żn)15ąĪĢr(sh©¬)▀B└m(x©┤)▓╗ķgöÓ╣żū„Ż¼Įoæ¬(y©®ng)ė├¼F(xi©żn)ł÷(ch©Żng)╠ß╣®ĘĆ(w©¦n)Č©┐╔┐┐Ą─▒Ē¼F(xi©żn)ĪŻ
═¼Ģr(sh©¬)ķ_(k©Īi)Ę┼▄øė▓╝■Įė┐┌Ż¼ų¦│ųČÓŲĮ┼_(t©ói)▓┘ū„Ż¼ĘĮ▒Ńė├æ¶┐ņ╦┘ŪąōQ Ż¼═Ļ╚½ķ_(k©Īi)Ę┼Ą─ė├æ¶Įė┐┌Ż¼░³└©ęį╠½ŠW(w©Żng)Īó┐žųŲĮė┐┌Ż¼ļŖį┤Ą╚öU(ku©░)š╣Įė┐┌Ż¼90%Ą─Įė┐┌Č©┴xŠ∙ŽÓ═¼Ż¼┐╔ĘĮ▒Ńė├æ¶┐ņ╦┘ŪąōQĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |